Reserch Projects
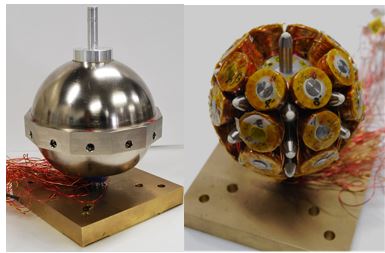
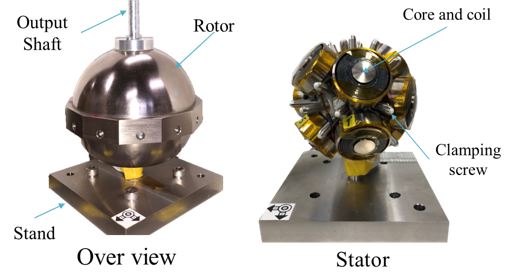
Spherical actuator
・3-DOF basic model
 |
This is a basic model of the spherical actuator, proposed in Hirata laboratory, which realizes 3-DOF of motion by controlling 6 phases of current. |
poster
movie
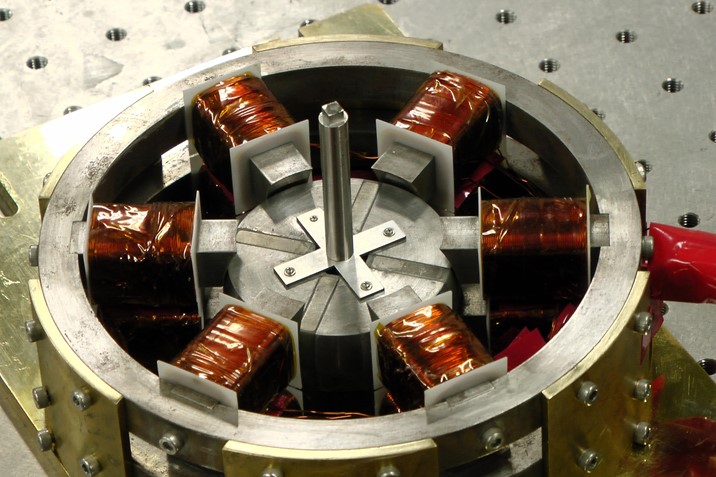
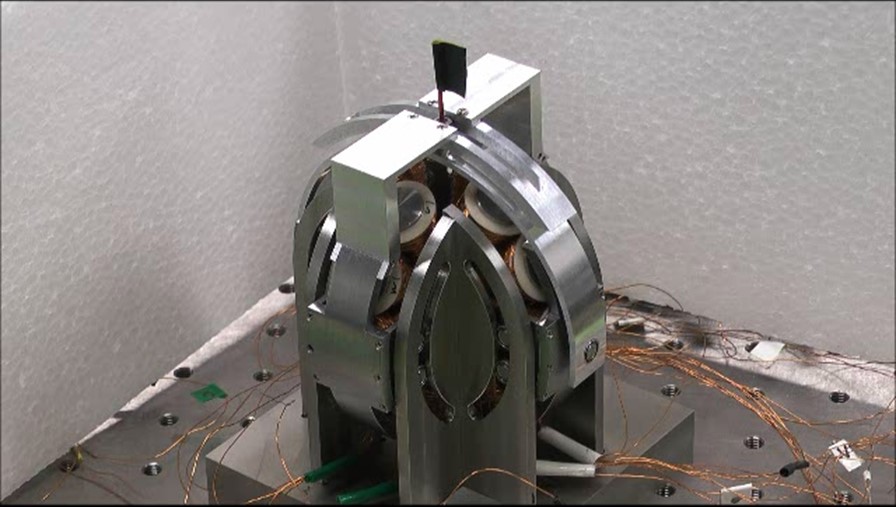
・3-DOF outer rotor type model (16-phase model)
 |
This model can be driven by 3-DOF with 16 phases of current. The distance between the center of rotation and the generating surface of the electromagnetic force can be extended by using the outer rotor type, in which the mover is placed on the outside of the stator. This makes it possible to increase the torque. |
poster
movie
・3-DOF outer rotor type model (5-phase model)
 |
By reviewing the structure and using genetic algorithms, this model reduces the current requirement from 16-phase to 5-phase. This makes it possible to miniaturize not only the actuator but also the controller. |
poster
movie
・3-DOF independent controlled model
 |
This is an independent control model that can control rotation around the Z-axis and rotation around the X and Y axes independently. |
poster
・2-DOF outer rotor type model
 |
The model can be driven with 2-DOF by 12-phase current and has high torque characteristics even when driving X and Y axes simultaneously. |
poster
movie
・2-DOF Independent Controlled Model (Synchronous motor version)
 |
The structure around the X and Y axes is connected by independent rails, and can be controlled independently of each other. |
poster
movie
・2-DOF Independent Controlled Model (Stepper motor version)
 |
This is a stepping motor version of the above 2-DOF independent controlled model. A large space can be created in the middle of the actuator and various devices can be placed inside. |
・2-DOF differential coupled model
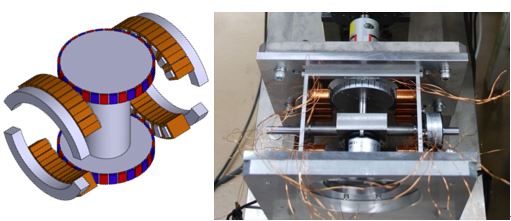 |
This is a model that achieves 2-DOF by differentially coupling two motor structures (like a differential gear). |
poster
movie
・2-DOF model for the eye
 |
The model is designed to be compact and dedicated for the android eye, and can be controlled independently as well as the 2-DOF independent control model (stepping motor version). |
poster
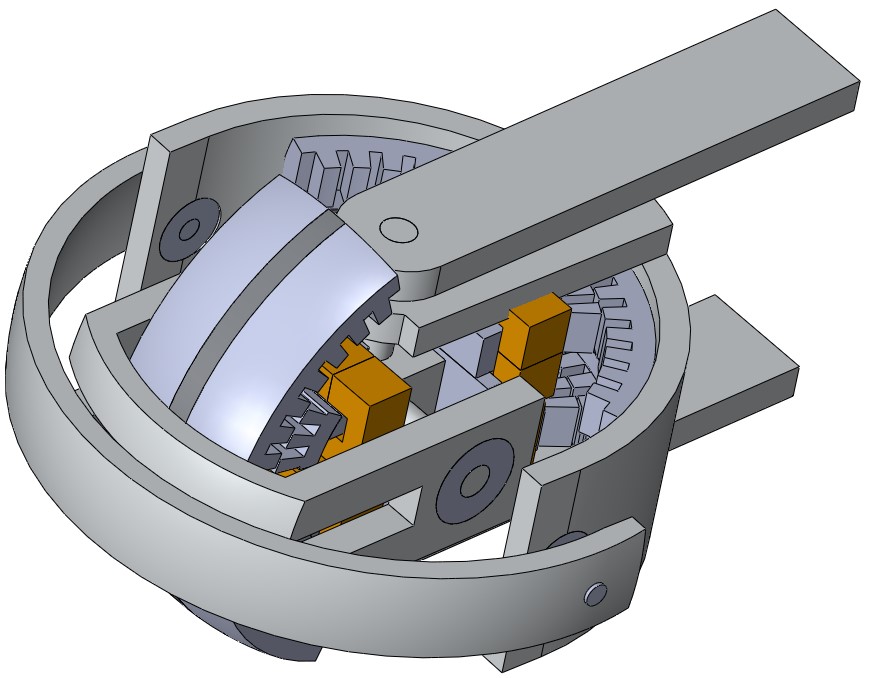
・Three-degree-of-freedom actuator for image stabilization
 | The three-degree-of-freedom actuator for image stabilization is designed for camera stabilizer of autonomous mobile systems such as robots and drones. The actuator can generate three-degree-of-freedom motion by three-phase control. |
poster
movie
・Angle sensing using image sensors
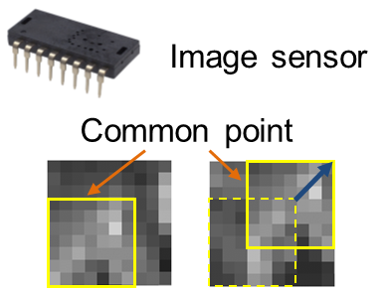 |
This is a method to measure the movement of the surface of a sphere by using an image sensor used for a mouse in a personal computer. Two image sensors can be used to measure 3-DOF relative to each other. |
・Angle sensing with image sensor and laser
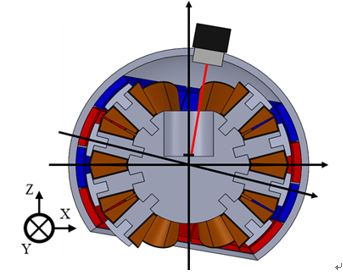 |
The image sensor is mounted on a stator and a laser beam is irradiated from rotor to the image sensor, and the angle is measured in two degrees of freedom. Since only a point of the laser is visible on the image sensor, the image processing is very easy and the absolute angle of two degrees of freedom can be measured. |
・Angle sensing by color sensor (gradient type)
 |
This is a method to measure the position of a mover by reading the gradation pattern on the surface of the mover with a color sensor. By mapping color and pose in a one-to-one relationship, it is possible to measure the absolute position with 3-DOF. |
poster
・Angle sensing by color sensor (color encoder type)
 |
This is a method to measure the position of a mover by reading the 9-color grid pattern on the surface of the mover with a color sensor. Unlike the gradient method, it can only measure the relative angle of rotation, but it is less influenced by the color degradation. |
・Angle sensing using Hall effect sensors
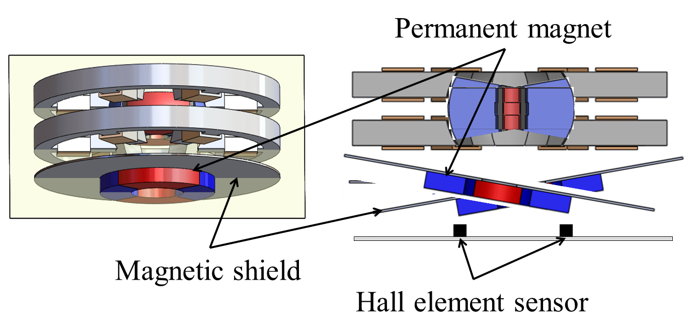 |
This is a method to measure the relative angle of 3-DOF by reading the change of magnetic field by a permanent magnet attached to a mover in an array of Hall effect sensors. |
poster
・Angle sensing using an inertial measurement unit (IMU)
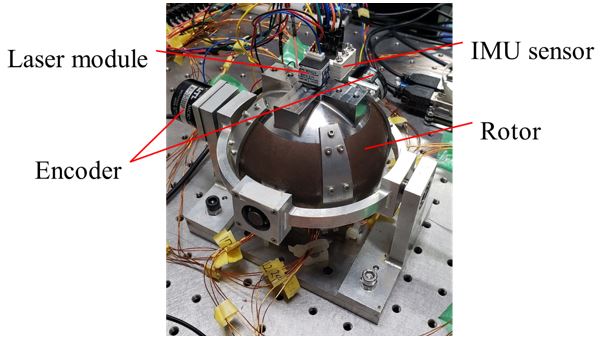 |
This is a method for estimating 3-DOF motion using acceleration and gyroscope, which are used for attitude estimation of multicopter drones. |
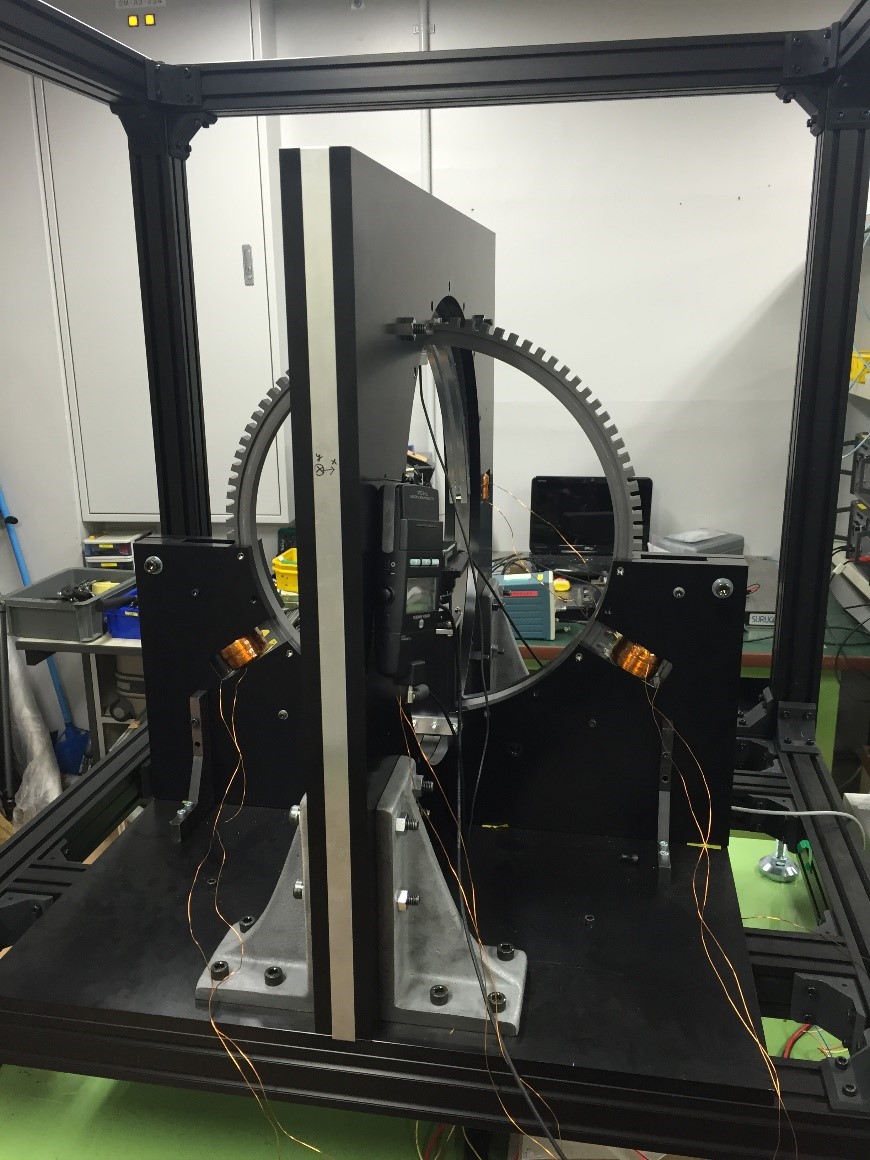
・Torque measurement system
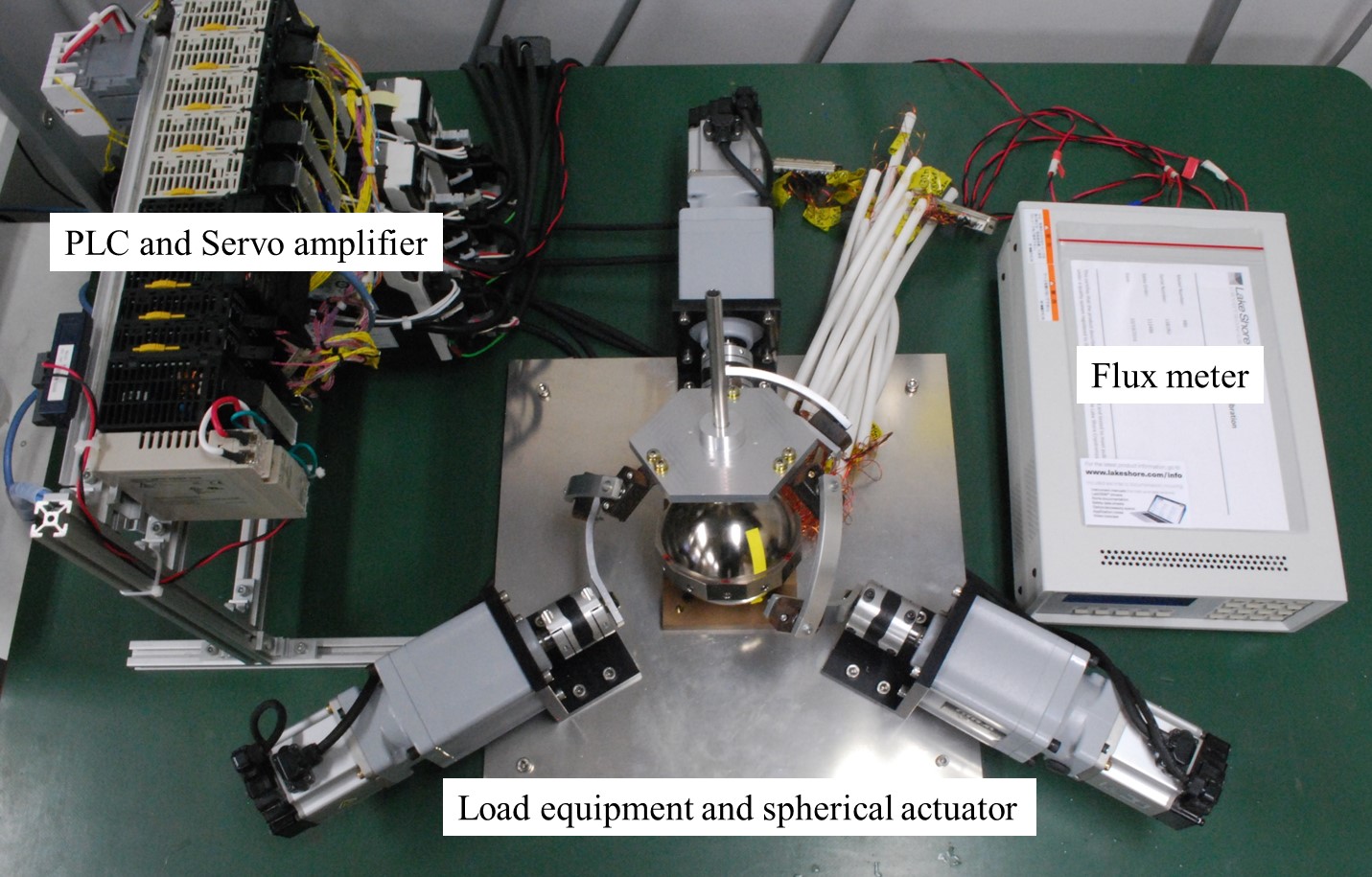 |
The spherical actuator generates torque in various orientations and axes of rotation. Therefore, it is also necessary to measure torque in various positions and axes of rotation. Therefore, we are also developing a multi-DOF measuring device for torque measurement. |
poster