研究内容
球面アクチュエータ
・3自由度基本モデル
 |
平田研で最初に提案した球面アクチュエータの基本モデルです.6相の電流を制御することによって3自由度の動作を実現することが可能です(現在同時駆動はできません). |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)
テーマ紹介用動画
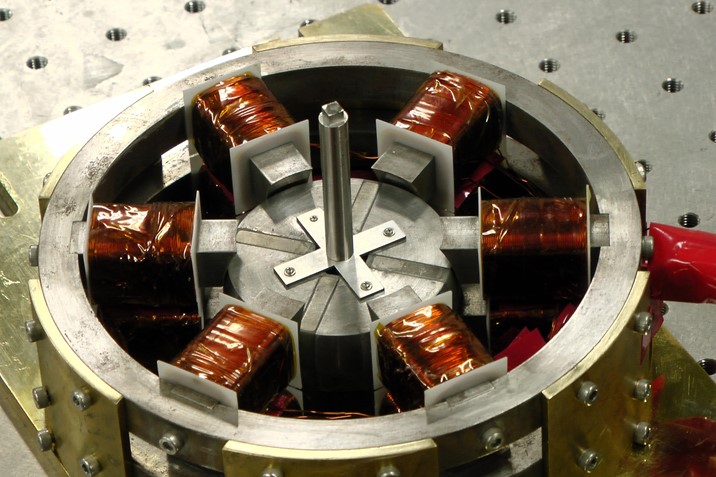
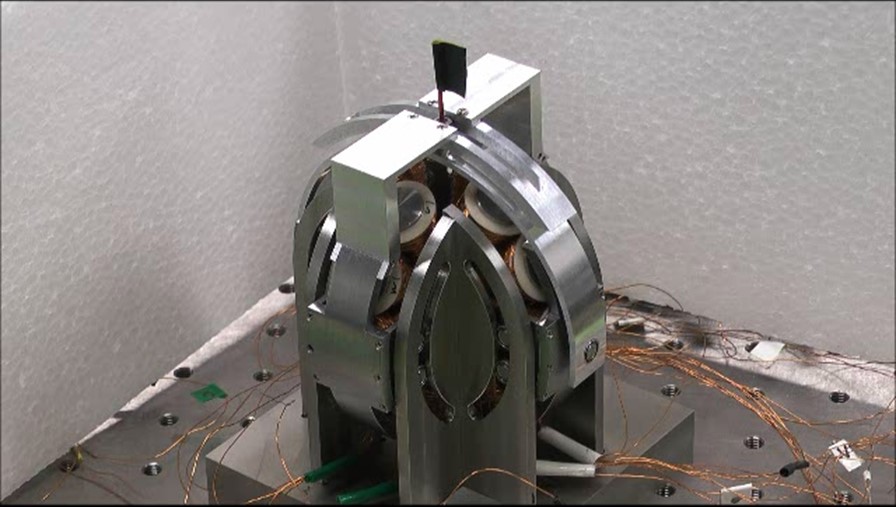
・3自由度アウターロータ型モデル(16相駆動版)
 |
16相の電流を制御し,3自由度駆動が可能なモデルです.可動子を固定子の外側に配置するアウターロータ型にすることで回転中心から電磁力の発生面までの距離を長くすることができ,高トルク化が可能です.現在はさらなる高トルク化に向けて研究を行っています. |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)
テーマ紹介用動画
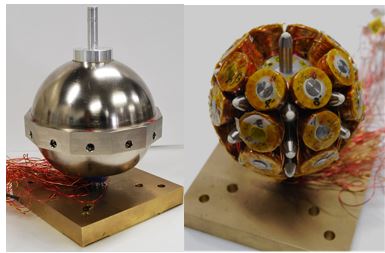
・3自由度アウターロータ型モデル(5相駆動版)
 |
構造の見直しや遺伝的アルゴリズムの使用により,これまで16相必要であった電流を5相まで減らしたモデルです.これにより,アクチュエータだけでなく制御装置の小型化も可能となりました. |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)
テーマ紹介用動画
・3自由度独立制御モデル

・2自由度アウターロータ型モデル
 |
12相の電流を制御することで2自由度の駆動を実現するモデルです.X,Y軸同時駆動時にも高いトルク特性を有します. |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)
テーマ紹介動画
・2自由度独立制御モデル(同期モータ版)
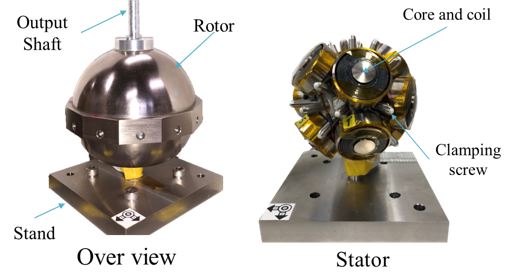
・2自由度独立制御モデル(ステッピングモータ版)
 |
上記2自由度独立制御モデルのステッピングモータ版です.構造を工夫することによりアクチュエータの真ん中に大きな空間を設けることができ,中に様々な装置を置くことが可能です. |
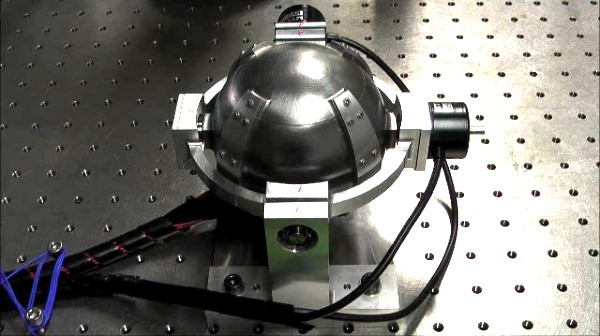
・2自由度差動結合モデル
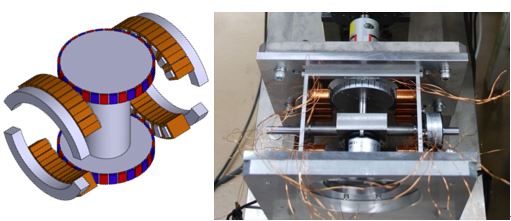 |
2つのモータ構造を差動結合(ディファレンシャルギアのような構造)することで2自由度の駆動を実現するモデルです. |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)
テーマ紹介動画
・2自由度眼球用モデル
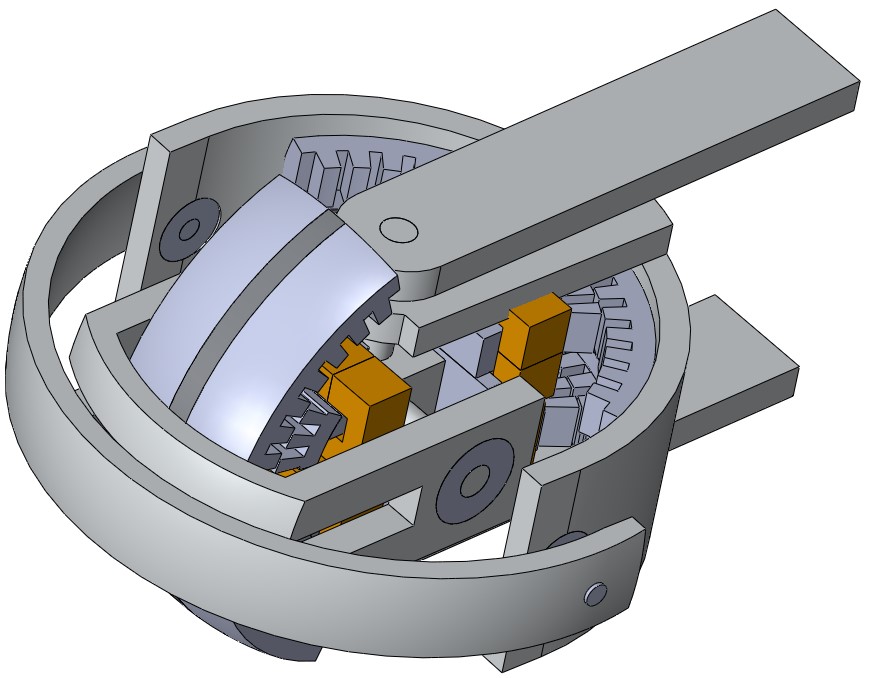
・振れ補正用3自由度アクチュエータ
 | ロボットやドローンをはじめとした自律移動システムの持つカメラにおいて発生する振れを補正する小型3自由度アクチュエータの研究を行っています.制御相数3相により駆動が可能です. |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)
テーマ紹介動画
・イメージセンサによる角度センシング
 |
マウスなどで使用されるイメージセンサを用いて可動子表面を高速で撮影し,前後の画像のずれから球体表面の動きを測定する手法です.イメージセンサを2つ使用することで3自由度の相対角度を測定可能です. |
・イメージセンサとレーザによる角度センシング
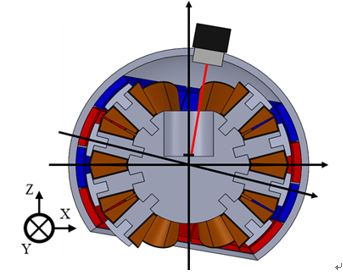 |
固定子にカメラに用いられるイメージセンサを設置し,可動子に取り付けたレーザをイメージセンサに照射することで2自由度の角度を測定する手法です.イメージセンサ上ではレーザの点だけが映るため画像処理が非常に簡単で,2自由度の絶対角度を測定できます. |
・カラーセンサによる角度センシング(グラデーション方式)
 |
可動子表面にグラデーションパターンを施し,カラーセンサで読み取ることで姿勢を測定する手法です.色と姿勢を1対1で対応付けることで3自由度の絶対姿勢を測定可能です. |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)
・カラーセンサによる角度センシング(カラーエンコーダ方式)
 |
可動子表面に9色のマス目状のパターンを施し,カラーセンサで読み取ることで姿勢を測定する手法です.グラデーション方式と異なり,どちらに回転したかという相対角度しか測定できませんが,色の劣化に強い特徴を持ちます. |
・ホール素子による角度センシング

・慣性計測装置(IMU)による角度センシング
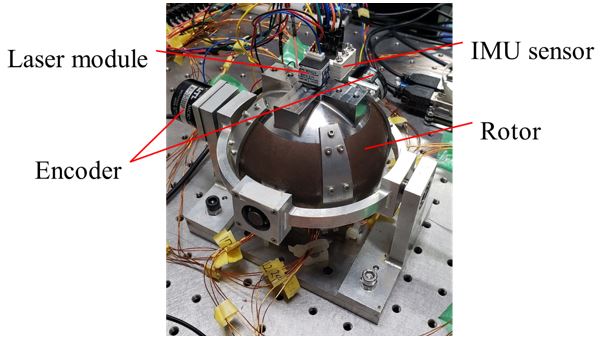 |
マルチコプタードローンの姿勢推定等にも使用されている加速度・ジャイロセンサを用いて3自由度の動きを推定する手法です. |
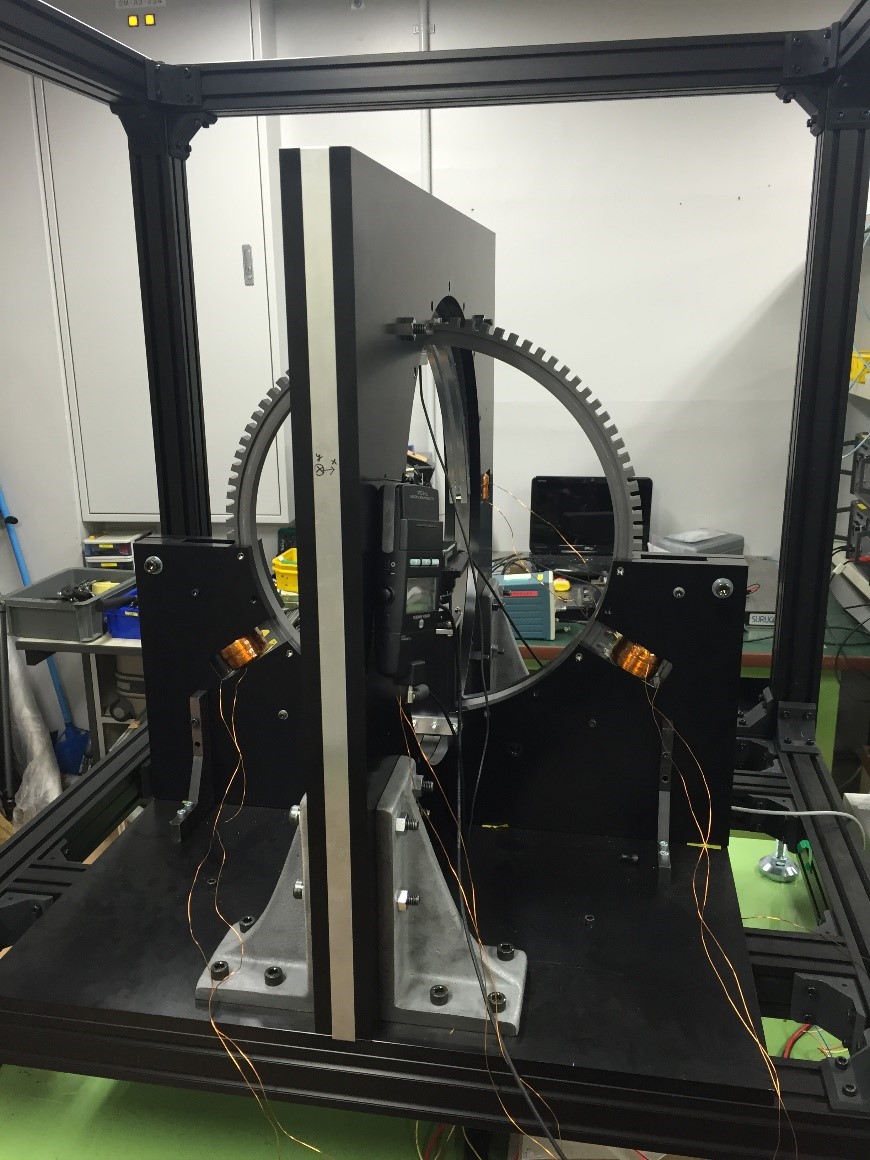
・トルク測定システム
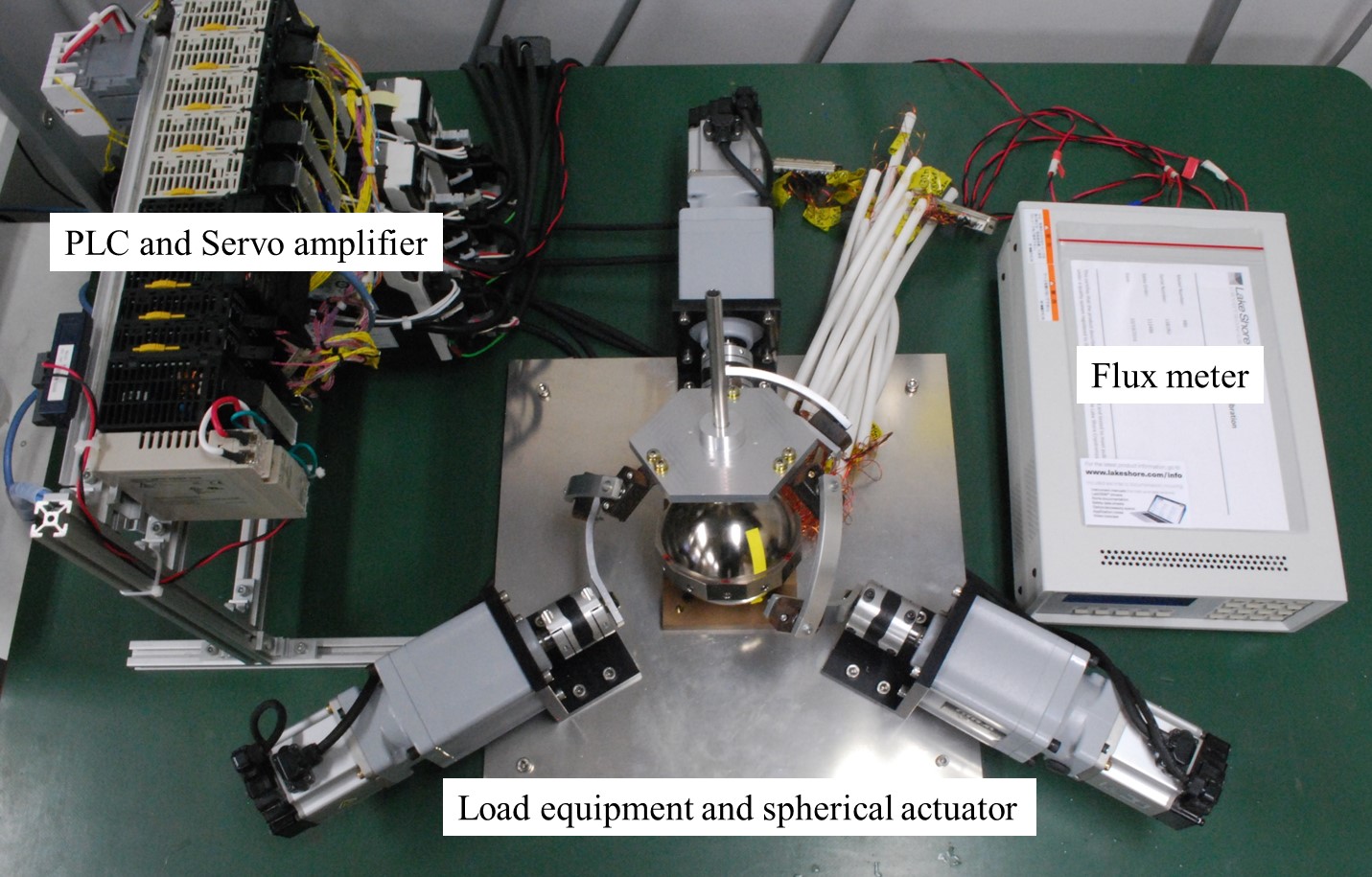 |
球面アクチュエータは様々な姿勢・回転軸でトルクを発生するため,測定も様々な姿勢・回転軸で行う必要があります。そのため,トルク測定用の多自由度測定装置の開発も行っています. |
テーマ紹介用資料(学会発表)ダウンロード(pdf形式)